FindPath(): while UnexploredQueue is not empty: // 가장 유망한 후보 선택 currentIndex = UnexploredQueue.PopMin() currentPoint = ComputedPoints[ currentIndex ] currentTriangle = currentPoint.Triangle // 목적지 도달 확인 if currentTriangle contains EndPoint: return BuildPath( currentIndex ) // 이미 방문한 삼각형은 skip if currentTriangle in ExploredTriangles: continue ExploredTriangles.Add( currentTriangle ) // 평면이 현재 삼각형과 교차하는 지점 찾기 crossingPoints = FindPlaneCrossings( currentTriangle, Plane ) // 각 교차점에 대해 for each point in crossingPoints: newPathLength = currentPathLength + Distance( currentPoint, point ) priority = CalculatePriority( point, newPathLength, EndPoint ) newIndex = AddPoint( point, nextTriangle ) UnexploredQueue.Push( newIndex, priority )
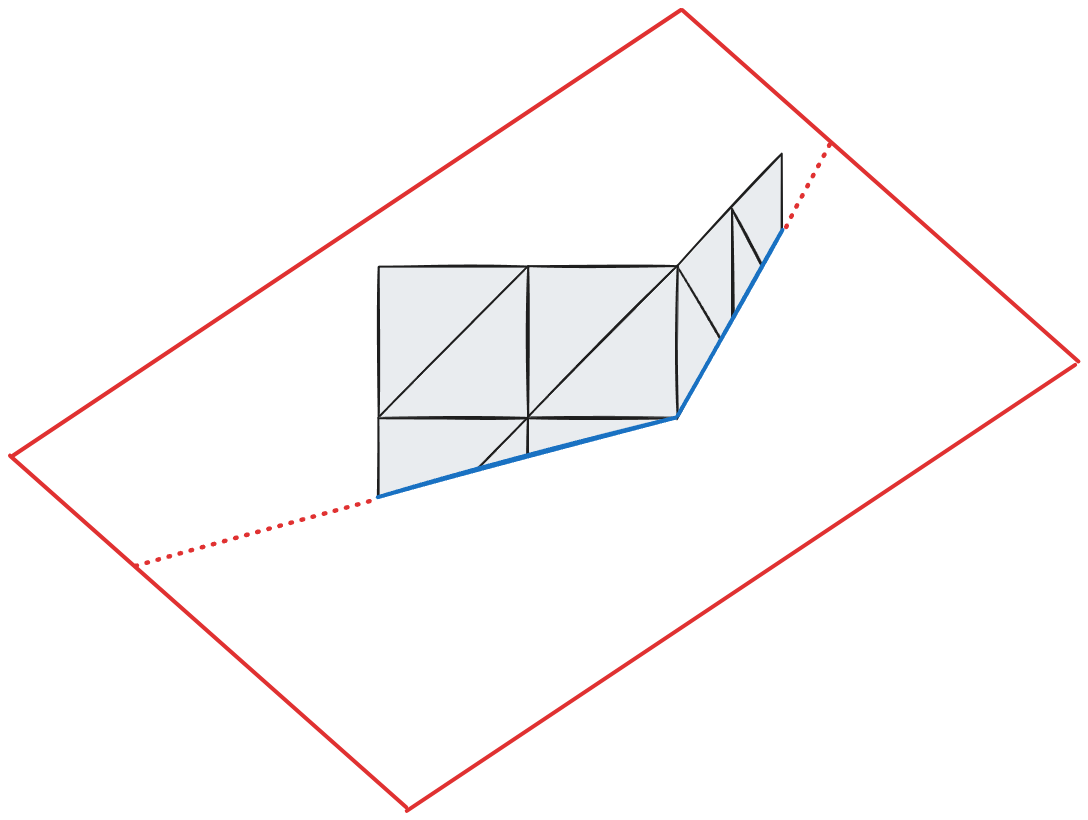
평면 교차 찾기
FindPlaneCrossings( Triangle, Plane ): crossings = [] vertices = Triangle.GetVertices() // 각 정점의 평면까지 거리 계산 for i = 0 to 2: distance[ i ] = SignedDistance( vertices[ i ], Plane ) sign[ i ] = Sign( distance[ i ] ) // 1. 정점 교차 확인 for i = 0 to 2: if Abs( distance[ i ] ) < Epsilon: // 정점이 평면 위에 있음 crossings.Add( VertexPoint( vertices[ i ] ) ) // 인접 삼각형들로 이동 가능 for each neighborTri in GetNeighborTriangles( vertices[ i ] ): if PlaneCrossesTriangle( neighborTri, Plane ): crossings.Add( point, neighborTri ) // 2. 엣지 교차 확인 for i = 0 to 2: j = (i + 1) % 3 // 두 정점이 평면의 반대편에 있는가? if sign[ i ] * sign[ j ] < 0: // 교차점 위치 계산 (선형 보간) t = distance[ i ] / ( distance[ i ] - distance[ j ] ) crossingPoint = (1 - t) * vertices[ i ] + t * vertices[ j ] crossings.Add( EdgePoint( crossingPoint, t ), oppositeTriangle ) return crossings